
Hiểu được phép đo lực và các thiết bị được sử dụng để đo lực đó không phải là điều đặc biệt khó khăn. Tất cả những gì bạn cần là sự hiểu biết cơ bản về cảm biến tải trọng và một hướng dẫn hữu ích để cung cấp cho bạn kiến thức đó. Tại Michigan Scientific, chúng tôi đã hỗ trợ bạn.
Hãy cùng khám phá thêm về cảm biến tải trọng—chúng là gì, chúng hoạt động như thế nào và khi nào bạn có thể sử dụng cảm biến tải trọng.
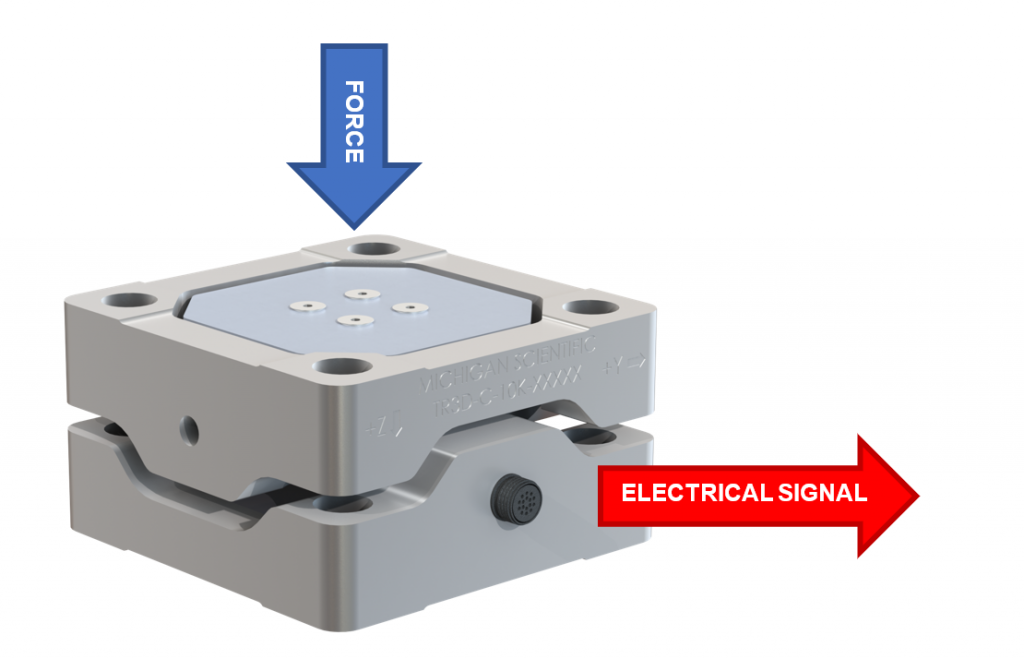
Load cell có thể được sử dụng để phát hiện khi nào một vật thể tác dụng lực. Bạn cũng có thể sử dụng chúng để theo dõi những thay đổi của lực tác dụng theo thời gian. Trong một số ứng dụng, cảm biến tải trọng được sử dụng để phát hiện sự hiện diện của lực bằng cách đo độ biến dạng trên bề mặt do tác động vào. Biến dạng là phản ứng biến dạng trên bề mặt do tải trọng tác dụng. Khi có lực tác dụng, cảm biến tải trọng sẽ chuyển năng lượng này thành tín hiệu điện.
Cảm biến tải trọng là gì?
Cảm biến tải trọng là các phần tử vật lý, còn được gọi là đầu dò. Bộ biến đổi nguồn có thể chuyển hóa dạng năng lượng này sang dạng năng lượng khác; nghĩa là nếu bạn tác dụng lực vào cảm biến tải trọng, nó có thể chuyển thành tín hiệu điện.
Tín hiệu này sẽ có cường độ tỷ lệ thuận với lực tác dụng, giúp dễ đo hơn.
Các loại tế bào tải là gì?
Có nhiều loại Nạp tế bào. Ba loại phổ biến nhất là cảm biến tải trọng, cảm biến tải trọng thủy lực và khí nén. Điều này có nghĩa là có ba cách dễ dàng để cảm biến tải trọng chuyển lực tác dụng thành số đọc có thể đo được. Michigan Scientific chuyên về cả cảm biến tải trọng đo biến dạng sẵn có và cảm biến tải trọng đo biến dạng tùy chỉnh.
Và mặc dù có các loại cảm ứng lực khác nhưng chúng ít được áp dụng hơn.
Cảm biến tải trọng đo biến dạng: Phần tử cơ khí
Cảm biến tải trọng đo biến dạng có bản chất cơ học. Bộ phận cơ học này sử dụng một máy đo biến dạng hoặc nhiều máy đo biến dạng để cảm nhận sự biến dạng do lực tác dụng gây ra.
Máy đo biến dạng thường khác nhau về kích thước, vật liệu sản xuất và thậm chí cả thiết lập cơ khí để phù hợp với các tải trọng khác nhau. Họ cũng có thể có những mức độ nhạy cảm khác nhau tùy theo mục đích dự định của họ. Mặc dù có thiết kế khác nhau nhưng tất cả các máy đo biến dạng đều hoạt động trên cùng một khái niệm, biến độ lệch thành sự thay đổi điện trở.
Máy đo biến dạng thông thường được tạo thành từ một dây hoặc lá rất mảnh theo dạng lưới, trong đó sự thay đổi tuyến tính của điện trở có thể được gây ra bằng cách phát hiện biến dạng do lực, trọng lượng hoặc áp suất theo một hướng cụ thể. Thường có điện trở cơ bản là 120Ω, 350Ω hoặc 1,000Ω.
Như đã lưu ý ở trên, mỗi máy đo biến dạng có thể có mức độ nhạy khác nhau. Giá trị này được biểu thị bằng “hệ số đo” hoặc GF và được định nghĩa là tỷ lệ giữa sự thay đổi một phần của điện trở với biến dạng một phần theo hướng tác dụng của lực (hoặc biến dạng).
Hệ số đo = GF = (∆R/R)/(∆L/L) = (∆R/R)/ε, trong đó ε = biến dạng
Cảm biến tải trọng thủy lực: Thiết lập pít-tông và xi lanh
Mặt khác, cảm biến tải trọng thủy lực sử dụng cách bố trí xi lanh và piston thông thường để thể hiện sự thay đổi áp suất. Chuyển động của piston có thể giúp xác định trọng lượng của vật bằng cách đo sự thay đổi áp suất trên ống Bourdon được nối.
Cảm biến tải trọng khí nén: Sử dụng áp suất không khí
Cuối cùng, cảm biến tải trọng khí nén sử dụng áp suất không khí để đạt được kết quả tương tự. Áp suất không khí được tác dụng lên một đầu của màng ngăn, sau đó thoát ra qua vòi ở đáy cảm biến tải trọng.
Cả cảm biến tải trọng thủy lực và khí nén đều hoạt động tốt trong môi trường phòng thí nghiệm với tải trọng tĩnh. Cảm biến tải trọng đo biến dạng rất hữu ích cho tải trọng động và thử nghiệm tại hiện trường.